Robot-Gated Interactive Imitation Learning with Adaptive Intervention Mechanism
ICML 2025
Haoyuan Cai 1 , Zhenghao Peng 1 , Bolei Zhou 1
1 University of California, Los Angeles
Summary
Adaptive Intervention Mechanism (AIM) is a robot-gated Interactive Imitation Learning (IIL) algorithm.
- AIM learns an adaptive intervention criterion via a proxy Q-function that mimics human decisions.
- Human does not need to continuously monitor until AIM requests human help.
In experiments on continuous (MetaDrive) and discrete (MiniGrid) tasks, AIM:
- Improves learning efficiency and cuts expert takeover cost by 40%.
- Requires the expert only demonstrate 1-2 trajectories before switching to robot-gated mode.
- Focuses on safety-critical states to collect fewer, higher-quality demonstrations.
- Matches the human-gated methods’ performance with AIM-gated interventions.
Adaptive Intervention Mechanism
We apply a proxy Q function to approximate the human’s intervention behavior. The core of AIM is the learned proxy Q-function that predicts when a human would step in: it’s trained to output +1 whenever the agent’s action deviates significantly from demonstrated expert behavior (signaling that intervention is needed) and –1 when the agent matches the expert’s action (no intervention). By labeling agent-sampled actions with +1 and human demonstrations with –1, AIM learns to mimic the human gating mechanism without explicit rules. This lets the system automatically decide when to request help as the agent’s policy improves.
AIM Loss Function

TD Loss Function
\(J^{\mathrm{TD}}(\theta) = \mathbb{E}_{(s,a,s')}\Bigl\lvert
Q_\theta(s,a) - \gamma \max_{a'} Q_\theta(s',a')\Bigr\rvert^2\)
Combined Objective
\(J(\theta) = J^{\mathrm{AIM}}(\theta) + J^{\mathrm{TD}}(\theta)\)
Intervention Rule
Request human help whenever
\(Q_\theta(s,a_n) > \text{the }(1-\delta)\text{-quantile of }Q_\theta(s,a_n).\)
We select \(\delta=0.05\) to balance the training safety and expert take-over cost.
Experiment
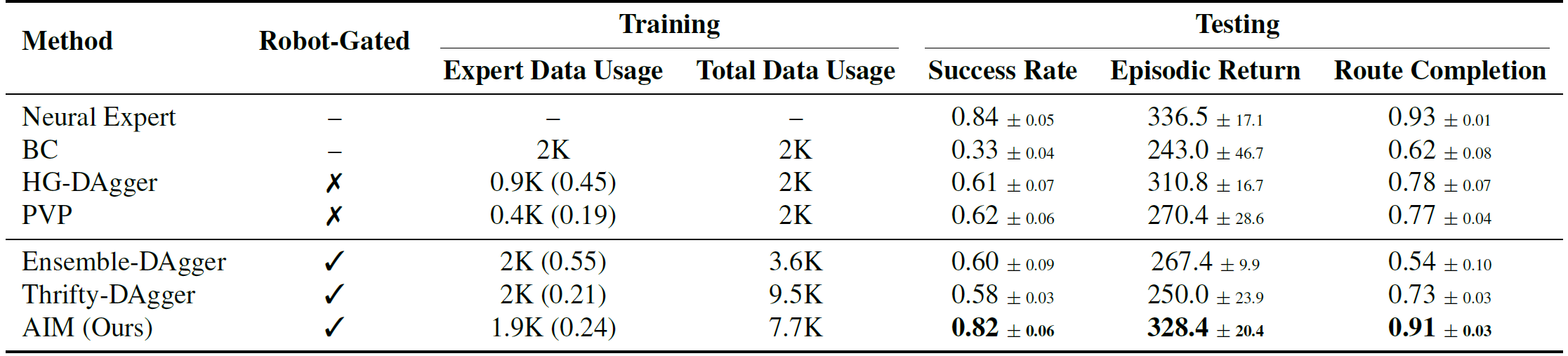
Compared to the Interactive Imitation Learning baselines, our method AIM reduces expert-involved steps.
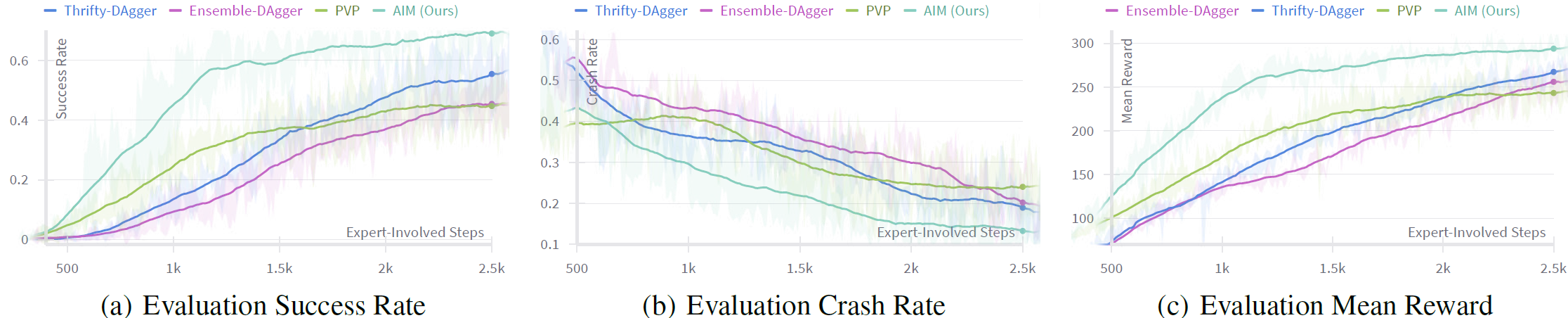
Our method AIM requests fewer expert help to achieve near-optimal performance compared with robot-gated IIL baselines in MetaDrive. Compared with human-gated ones, AIM reduces expert monitoring effort and cognitive cost.
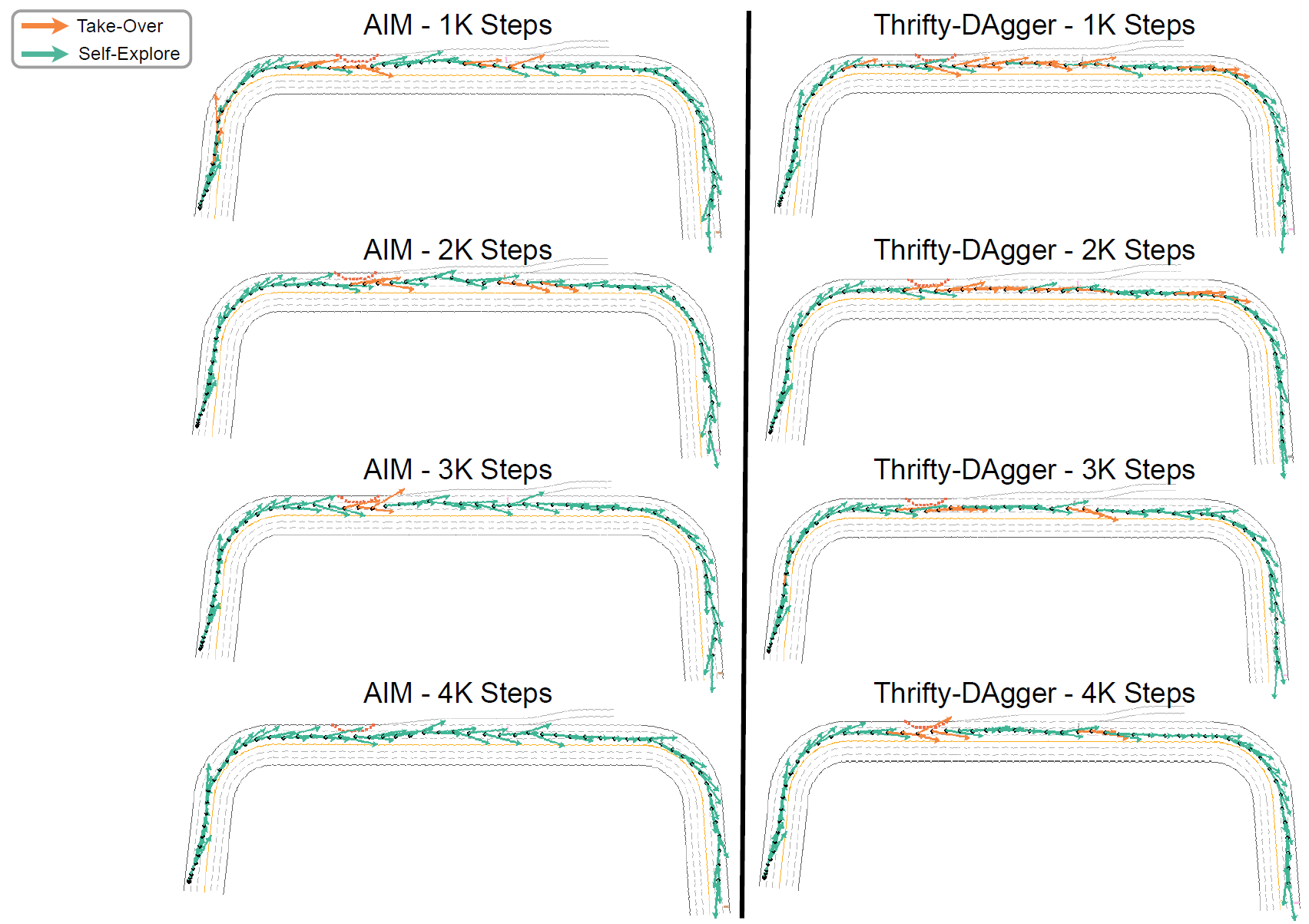
A case study in a toy MetaDrive environment shows that our method AIM reduces expert queries as the agent becomes more proficient, while the uncertainty-based method Thrifty-DAgger continues to request expert assistance frequently on the straight road.
Related Works from Us
-
Predictive Preference Learning (NeurIPS 2025): PPL is a model-based online preference learning algorithm. It predicts future failures and learn from hypotheical preference data: if expert takeover now, it might also takeover in near states if we let the agent continuously run.
-
Adaptive Intervention Mechanism (ICML 2025): AIM is a robot-gated Interactive Imitation Learning (IIL) algorithm that cuts expert takeover cost by 40%.
-
PVP for Real-world Robot Learning (ICRA 2025): We apply PVP for real-world robot learning, showing that we can train mobile robots from online human intervention and demonstration, from scratch, without reward, from raw sensors, and in 10 minutes!
-
Proxy Value Propagation (PVP) (NeurIPS 2023 Spotlight): Proxy Value Propagation (PVP) is an Interactive Imitation Learning algorithm adopts the reward-free setting and further improves learning from active human involvement. These improvements address the catastrophic forgetting and unstable behavior of the learning agent, and the difficulty in learning the sparse yet crucial human behaviors. As an PVP achieves 10x faster learning efficiency, the best user experience and safer human-robot shared control.
-
Teacher-Student Shared Control (ICLR 2023): In Teacher-Student Shared Control (TS2C), we examined the impact of using the value function as a criterion for determining when the PPO expert should intervene. TS2C makes it possible to achieve student policy that has super-teacher performance.
-
Human-AI Copilot Optimization (ICLR 2022): Building upon the methodology of EGPO, and substituting the PPO expert with a real human subject, we proposed Human-AI Copilot Optimization (HACO) and it demonstrated significant improvements in learning efficiency over traditional RL baselines.
-
Expert Guided Policy Optimization (CoRL 2021): Our research on human-in-the-loop policy learning began in 2021. The first published work is Expert Guided Policy Optimization (EGPO), where we explored how an RL agent can benefit from the intervention of a PPO expert.
Reference
Adaptive Intervention Mechanism (ICML 2025):
@article{cai2025robot,
title={Robot-Gated Interactive Imitation Learning with Adaptive Intervention Mechanism},
author={Cai, Haoyuan and Peng, Zhenghao and Zhou, Bolei},
journal={International Conference on Machine Learning},
year={2025}
}
Acknowledgement: The project was supported by NSF grants CCF-2344955 and IIS-2339769. ZP is supported by the Amazon Fellowship via UCLA Science Hub.