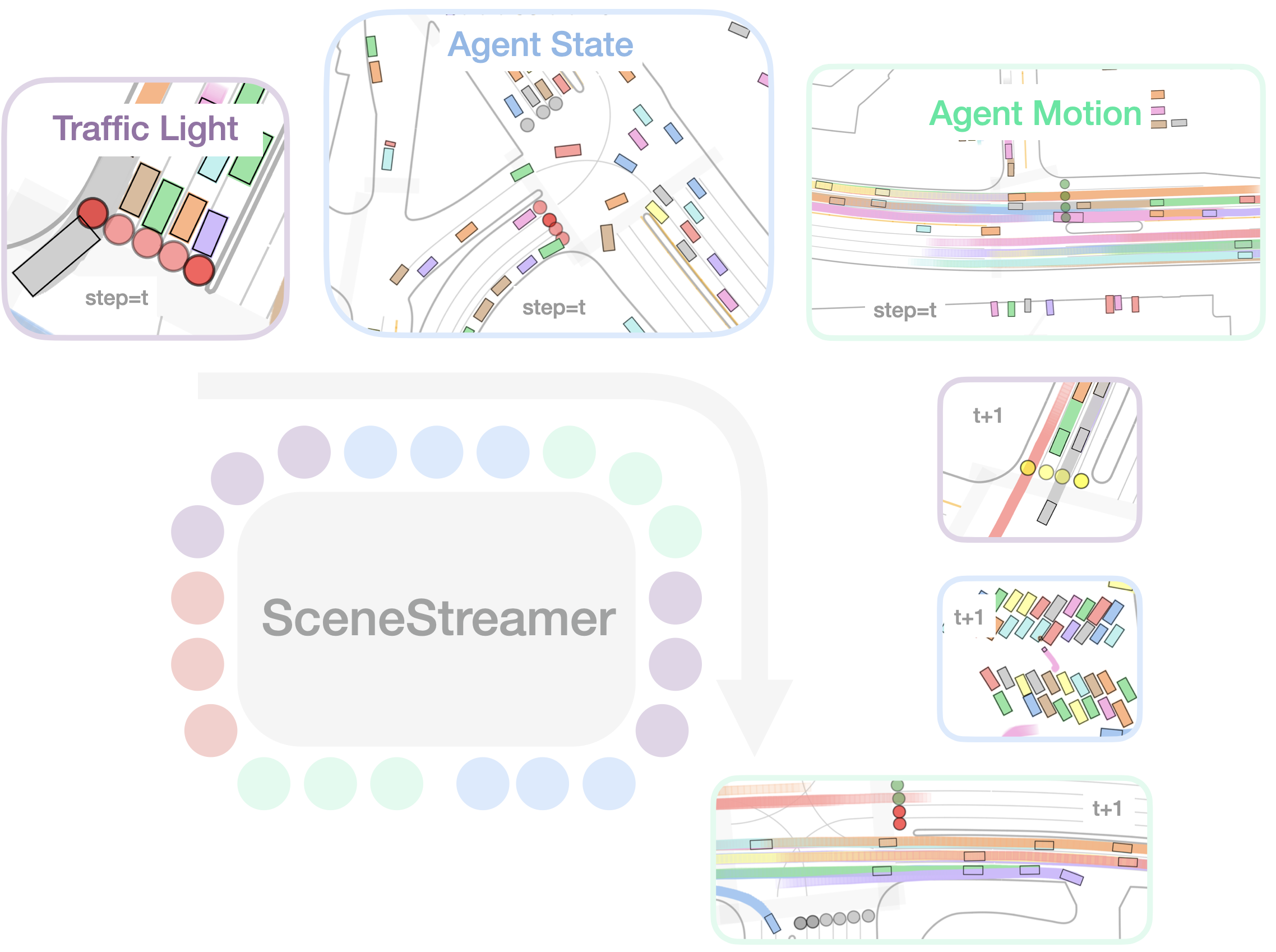
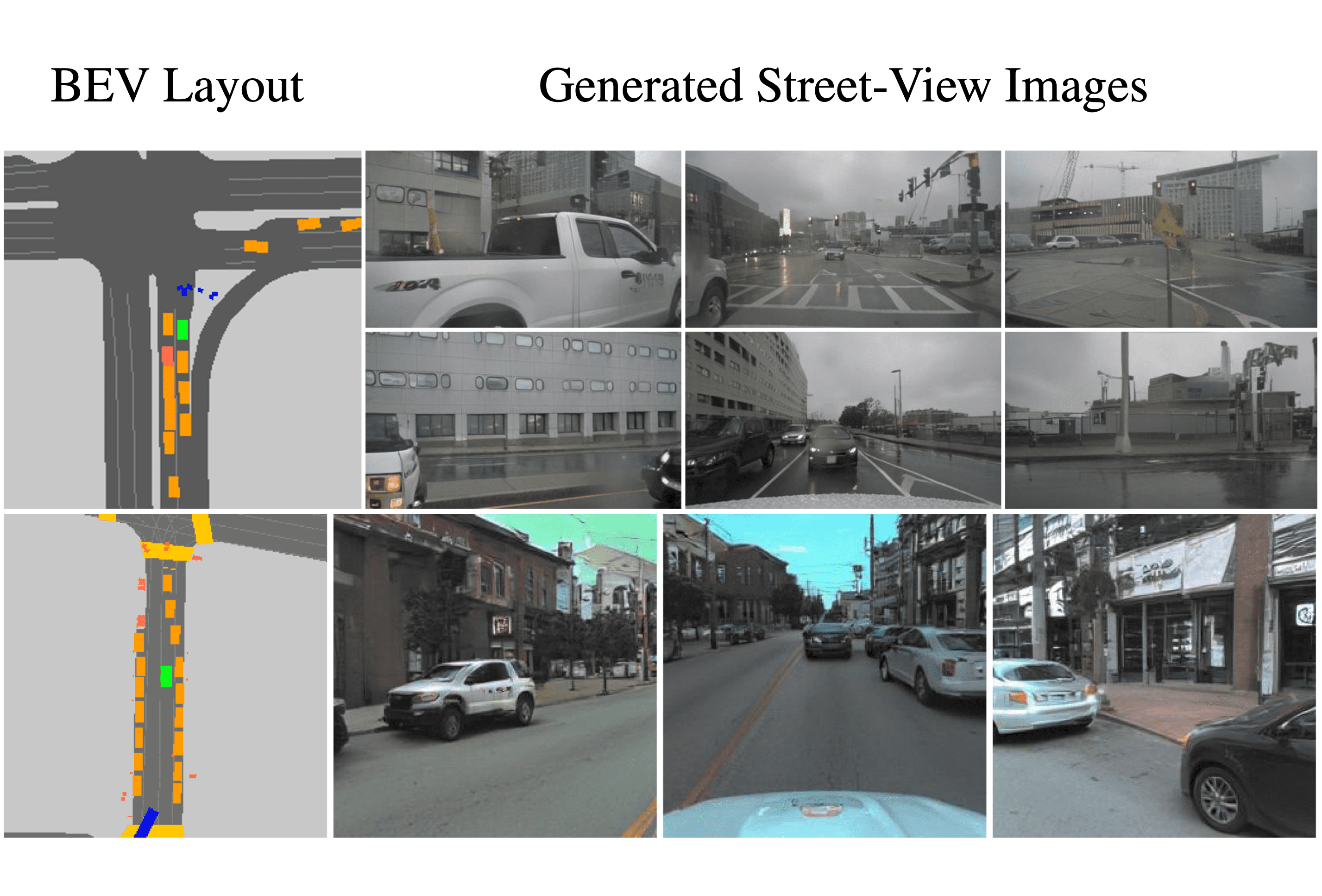
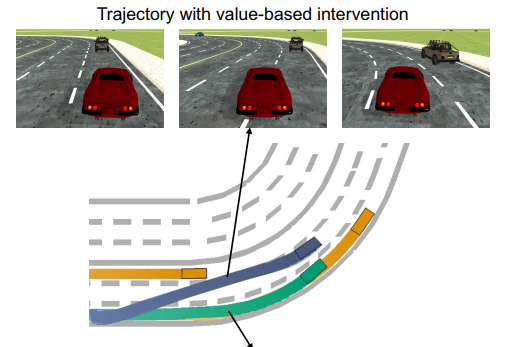
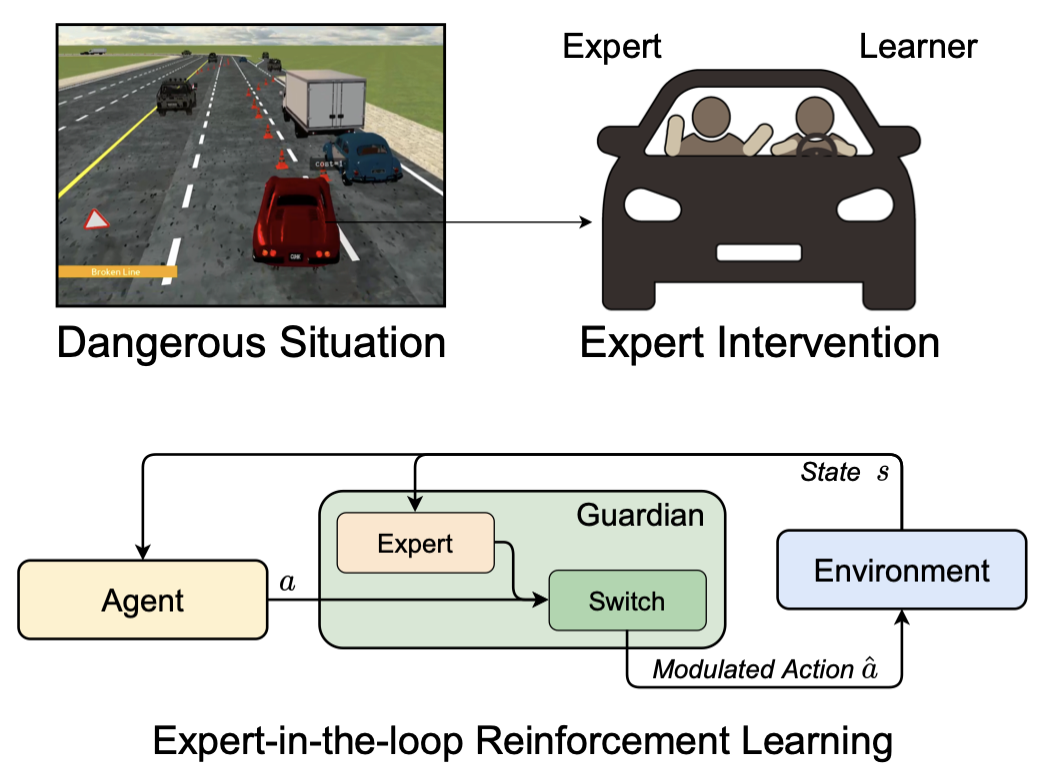
ICLR SceneStreamer: Continuous Scenario Generation as Next Token Group Prediction Zhenghao Peng, Yuxin Liu, and Bolei Zhou International Conference on Learning Representation (ICLR) , 2026 Webpage PDF NeurIPS Spotlight Predictive Preference Learning from Human Interventions Haoyuan Cai, Zhenghao Peng, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS Spotlight) , 2025 Webpage PDF NeurIPS Adv-BMT: Bidirectional Motion Transformer for Safety-Critical Traffic Scenario Generation Yuxin Liu*, Zhenghao Peng*, Xuanhao Cui, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS) , 2025 Webpage PDF arXiv From Seeing to Experiencing: Scaling Navigation Foundation Models with Reinforcement Learning Honglin He*, Yukai Ma*, Wayne Wu, and Bolei Zhou Preprint (arXiv) , 2025 Webpage PDF arXiv Dreamland: Controllable World Creation with Simulator and Generative Models Sicheng Mo*, Ziyang Leng*, Leon Liu, Weizhen Wang, Honglin He, and Bolei Zhou Preprint (arXiv) , 2025 Webpage PDF ICML AIM: Robot-Gated Interactive Imitation Learning with Adaptive Intervention Mechanism Haoyuan Cai, Zhenghao Peng, and Bolei Zhou International Conference on Machine Learning (ICML) , 2025 Webpage PDF CVPR Highlight Towards Autonomous Micromobility through Scalable Urban Simulation Wayne Wu*, Honglin He*, Chaoyuan Zhang, Jack He, Seth Z. Zhao, Ran Gong, Quanyi Li, and Bolei Zhou Conference on Computer Vision and Pattern Recognition (CVPR Highlight) , 2025 Webpage PDF Code CVPR Embodied Scene Understanding for Vision Language Models via MetaVQA Weizhen Wang, Chenda Duan, Zhenghao Peng, Yuxin Liu, and Bolei Zhou Conference on Computer Vision and Pattern Recognition (CVPR) , 2025 Webpage PDF CVPR Vid2Sim: Realistic and Interactive Simulation from Video for Urban Navigation Ziyang Xie, Zhizheng Liu, Zhenghao Peng, Wayne Wu, and Bolei Zhou Conference on Computer Vision and Pattern Recognition (CVPR) , 2025 Webpage PDF ICRA Data-Efficient Learning from Human Interventions for Mobile Robots Zhenghao Peng, Zhizheng Liu, and Bolei Zhou International Conference on Robotics and Automation (ICRA) , 2025 Webpage PDF ICLR Learning to Generate Diverse Pedestrian Movements from Web Videos with Noisy Labels Zhizheng Liu, Joe Lin, Wayne Wu, and Bolei Zhou International Conference on Learning Representation (ICLR) , 2025 Webpage PDF ICLR Spotlight MetaUrban: An Embodied AI Simulation Platform for Urban Micromobility Wayne Wu*, Honglin He*, Jack He, Yiran Wang, Chenda Duan, Zhizheng Liu, Quanyi Li, and Bolei Zhou International Conference on Learning Representation (ICLR Spotlight) , 2025 Webpage PDF Code NeurIPS SimGen: Simulator-conditioned Driving Scene Generation Yunsong Zhou, Michael Simon, Zhenghao Peng, Sicheng Mo, Hongzi Zhu, Minyi Guo, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS) , 2024 Webpage PDF arXiv Urban Scene Diffusion through Semantic Occupancy Map Junge Zhang, Qihang Zhang, Li Zhang, Ramana Rao Kompella, Gaowen Liu, Jiachen Li, and Bolei Zhou Preprint (arXiv) , 2024 Webpage PDF NeurIPS Spotlight Learning from Active Human Involvement through Proxy Value Propagation Zhenghao Peng, Wenjie Mo, Chenda Duan, Quanyi Li, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS Spotlight) , 2023 Webpage PDF Code CoRL CAT: Closed-loop Adversarial Training for Safe End-to-End Driving Linrui Zhang, Zhenghao Peng, Quanyi Li, and Bolei Zhou 7th Annual Conference on Robot Learning (CoRL) , 2023 Webpage PDF Code NeurIPS ScenarioNet: Open-Source Platform for Large-Scale Traffic Scenario Simulation and Modeling Quanyi Li*, Zhenghao Peng*, Lan Feng*, Zhizheng Liu, Chenda Duan, Wenjie Mo, and Bolei Zhou Thirty-seventh Conference on Neural Information Processing Systems Datasets and Benchmarks Track (NeurIPS) , 2023 Webpage PDF Code RA-L BEVGen: Street-View Image Generation from a Bird’s-Eye View Layout Alexander Swerdlow, Runsheng Xu, and Bolei Zhou IEEE Robotics and Automation Letters (RA-L) , 2024 Webpage PDF Code ICLR Guarded Policy Optimization with Imperfect Online Demonstrations Zhenghai Xue, Zhenghao Peng, Quanyi Li, Zhihan Liu, and Bolei Zhou International Conference on Learning Representation (ICLR) , 2023 Webpage PDF Code ICRA TrafficGen: Learning to Generate Diverse and Realistic Traffic Scenarios Lan Feng*, Quanyi Li*, Zhenghao Peng*, Shuhan Tan, and Bolei Zhou International Conference on Robotics and Automation (ICRA) , 2023 Webpage PDF Code Video NeurIPS Human-AI Shared Control via Policy Dissection Quanyi Li, Zhenghao Peng, Haibin Wu, Lan Feng, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS) , 2022 Webpage PDF Code ICLR Efficient Learning of Safe Driving Policy via Human-AI Copilot Optimization Quanyi Li*, Zhenghao Peng*, and Bolei Zhou International Conference on Learning Representations (ICLR) , 2022 Webpage PDF Code Video NeurIPS Learning to Simulate Self-driven Particles System with Coordinated Policy Optimization Zhenghao Peng, Quanyi Li, Chunxiao Liu, and Bolei Zhou Advances in Neural Information Processing Systems (NeurIPS) , 2021 Webpage PDF Code Talk CoRL Safe Driving via Expert Guided Policy Optimization Zhenghao Peng*, Quanyi Li*, Chunxiao Liu, and Bolei Zhou 5th Annual Conference on Robot Learning (CoRL) , 2021 Webpage PDF Code Video TPAMI MetaDrive: Composing Diverse Driving Scenarios for Generalizable Reinforcement Learning Quanyi Li*, Zhenghao Peng*, Lan Feng, Qihang Zhang, Zhenghai Xue, and Bolei Zhou (TPAMI) , 2021 Webpage PDF Code Video