MetaUrban: An Embodied AI Simulation Platform for Urban Micromobility
ICLR 2025 Spotlight
Wayne Wu* , Honglin He* , Jack He , Yiran Wang , Chenda Duan , Zhizheng Liu , Quanyi Li , Bolei Zhou
University of California, Los Angeles
TL;DR
-
MetaUrban is a compositional simulation platform for AI-driven urban micromobility research. It will be open-source to enable more research opportunities for the community, and foster generalizable and safe embodied AI and micromobility in cities.
Abstract
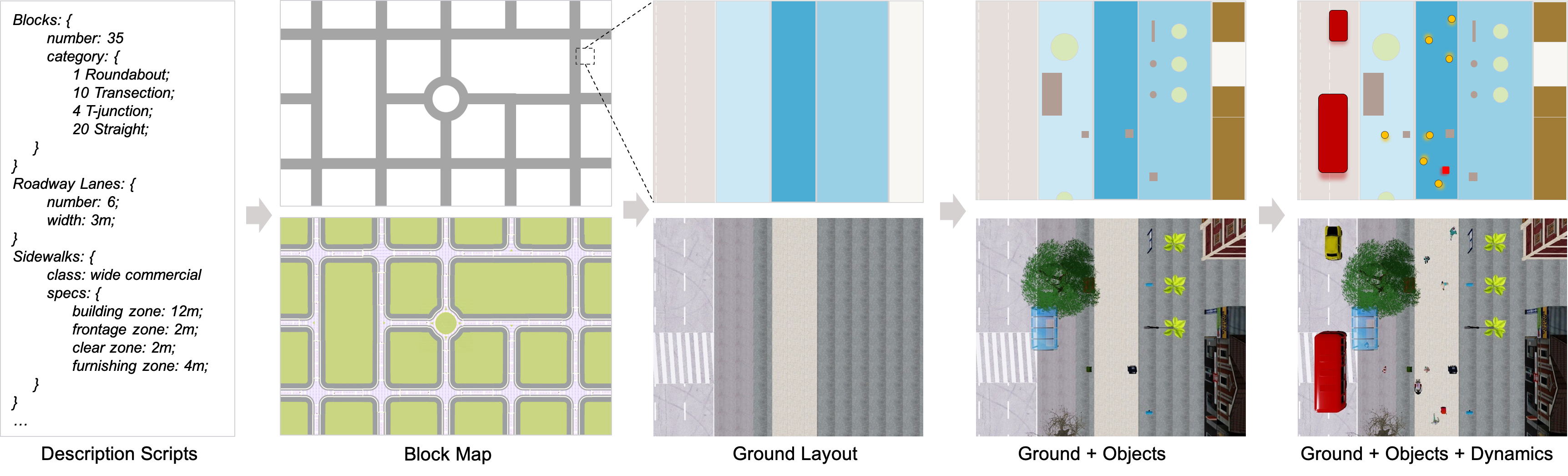
Public urban spaces like streetscapes and plazas serve residents and accommodate social life in all its vibrant variations. Recent advances in Robotics and Embodied AI make public urban spaces no longer exclusive to humans. Food delivery bots and electric wheelchairs have started sharing sidewalks with pedestrians, while robot dogs and humanoids have recently emerged in the street. Micromobility enabled by AI for short-distance travel in public urban spaces plays a crucial component in the future transportation system. Ensuring the generalizability and safety of AI models maneuvering mobile machines is essential. In this work, we present MetaUrban, a compositional simulation platform for AI-driven urban micromobility research. MetaUrban can construct an infinite number of interactive urban scenes from compositional elements, covering a vast array of ground plans, object placements, pedestrians, vulnerable road users, and other mobile agents' appearances and dynamics. We design point navigation and social navigation tasks as the pilot study using MetaUrban for urban micromobility research and establish various baselines of Reinforcement Learning and Imitation Learning. We conduct extensive evaluation across mobile machines, demonstrating that heterogeneous mechanical structures significantly influence the learning and execution of AI policies. We perform a thorough ablation study, showing that the compositional nature of the simulated environments can substantially improve the generalizability and safety of the trained mobile agents. MetaUrban will be made publicly available to provide research opportunities and foster safe and trustworthy embodied AI and micromobility in cities. The code and dataset are released.
Procedural Generation Pipeline
Urban Scene Gallery

Parade of Dynamic Agents
Sensors
Benchmarks
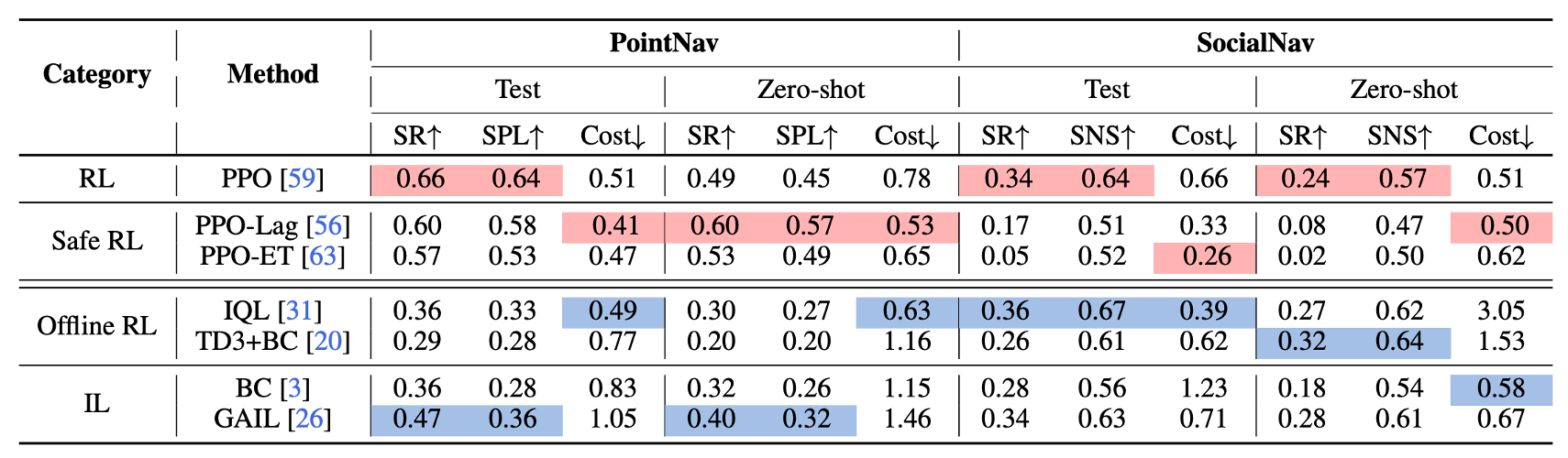
Results
The results of a PPO policy trained in MetaUrban environments on the social navigation task. We demonstrate success cases that can avoid collision with objects and other agents. However, there are still many interesting failure cases, which indicate the complexity of MetaUrban environments and the significant room for improvement of embodied agents in urban spaces.Success Cases
Failure Cases
Terrains and Materials
Traffic Rules
Interface for Demonstration Data Collection
Interface for Human-in-the-loop Learning
Impacts
Embodied AI. MetaUrban contributes to advancing areas such as robot navigation, social robotics, and interactive systems. It could facilitate the development of robust AI systems capable of understanding and navigating complex urban environments.Economy. MetaUrban could be used in businesses and services operating in urban environments, such as last-mile food delivery, assistive wheelchairs, and trash-cleaning robots. It could also drive innovation in urban planning and infrastructure development by providing simulation tools and insights into how spaces are utilized, thereby enhancing the economic and societal efficiency of public urban spaces like sidewalks and parks.
Society. By enabling the safe integration of robots and AI systems in public spaces, MetaUrban could support the development of assistive technologies that can aid in accessibility and public services. Using AI in public spaces might foster new forms of social interaction and community services, making urban spaces more livable and joyful.
Acknowledgement
The project was supported by the NSF Grants CNS-2235012, IIS-2339769, and TI-2346267, and the Intel Rising Star Faculty Award. We extend our gratitude for the excellent datasets, including 3D objects from Objaverse-XL and OmniObject3D, 3D humans from SynBody, and human motions from BEDLAM. Special thanks to Hao Zhu, Haiyi Mei, Jianglin Fu, Rongzhang Gu, Lei Yang, and Zhenghao Peng for their assistance and insightful discussions. Thank COCO Robot for donating virtual and physical robots.
Reference
@article{wu2025metaurban,
title={MetaUrban: An Embodied AI Simulation Platform for Urban Micromobility},
author={Wu, Wayne and He, Honglin and He, Jack and Wang, Yiran and Duan, Chenda and Liu, Zhizheng and Li, Quanyi and Zhou, Bolei},
journal={International Conference on Learning Representation},
year={2025}
}