CAT: Closed-loop Adversarial Training for
Safe End-to-End Driving
7th Annual Conference on Robot Learning (CoRL 2023)
Linrui Zhang 1 , Zhenghao Peng 2 , Quanyi Li 3 , Bolei Zhou 2
1 Tsinghua University , 2 University of California, Los Angeles , 3 University of Edinburgh
1min Spotlight Video
This video includes audio.
Overview
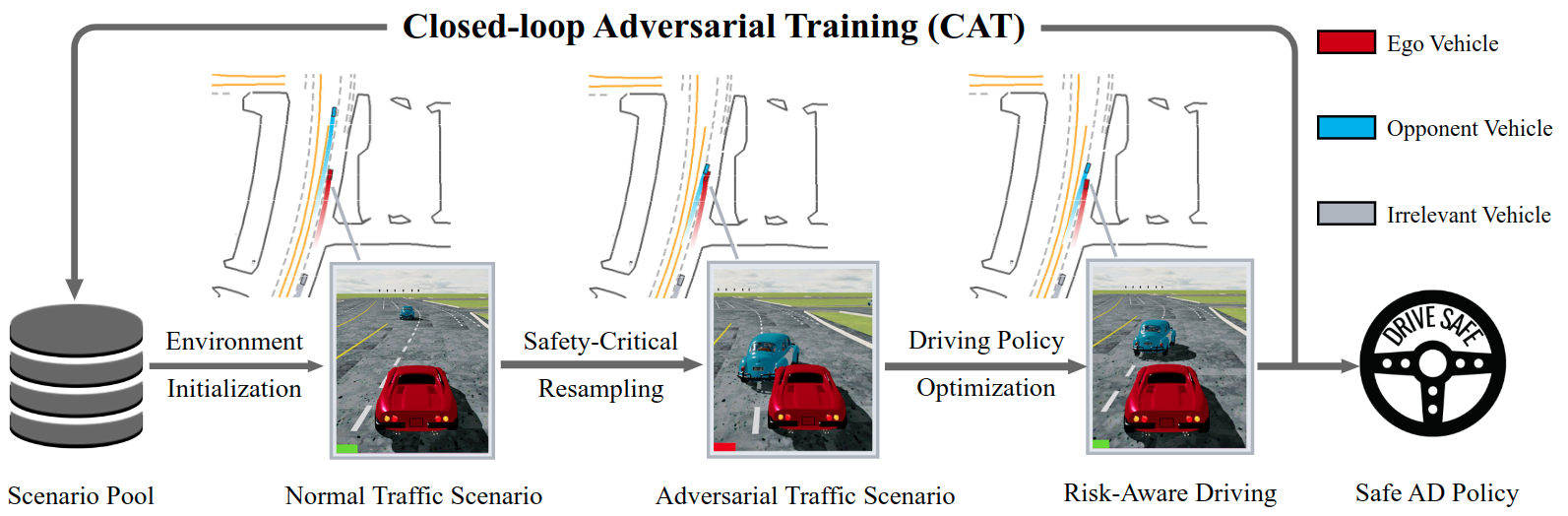
This work introduces the Closed-loop Adversarial Training (CAT) framework for safe end-to-end driving. CAT imports normal driving scenarios from real-world driving logs and then generates safety-critical counterparts as adversarial training environments tailored to the current driving policy. The agent continuously learns to address emerging challenges and improves risk awareness in a closed-loop pipeline. After training, the agent can achieve superior driving safety in both log-replay (+32.5%) and safety-critical traffic scenarios (+35%).
One crucial component of our framework is a novel factorized safety-critical resampling technique that efficiently turns log-replay driving scenarios into safety-critical ones during training.
Specifically, we cast the safety-critical traffic generation as the risk-conditioned Bayesian probability maximization problem and then decompose it into the multiplication of standard motion forecasting sub-problems. Thus, we can utilize off-the-shelf motion forecasting models as the learned prior to generate adversarial scenarios with high fidelity, diversity, and efficiency. Compared to previous adversarial traffic generation methods, the proposed technique obtains a competitive attack success rate while significantly reducing the computational cost (generally less than 1s), making the CAT framework effective and efficient for closed-loop end-to-end driving policy training.
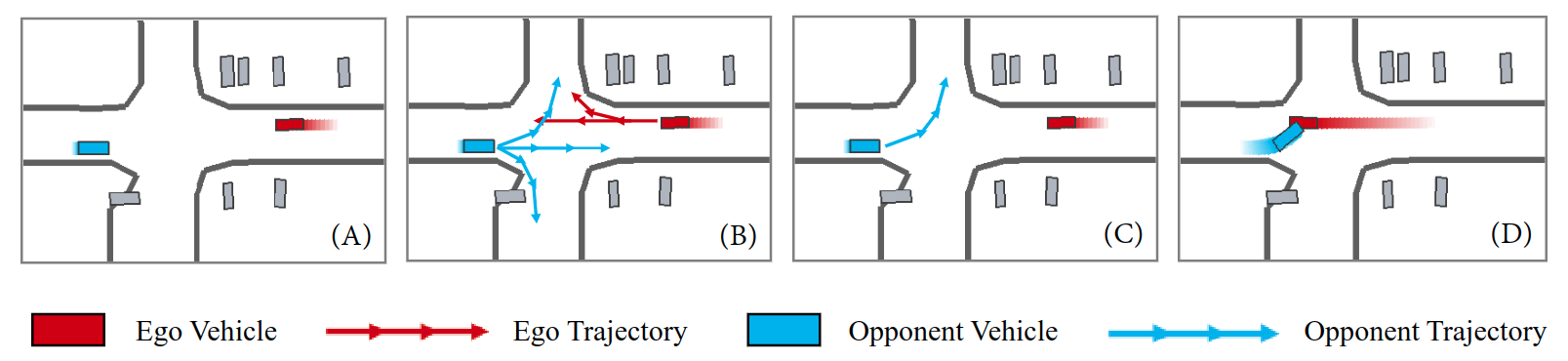
CAT-generated Adversarial Scenarios
Case 1: In the raw scenario, the blue car keeps going straight. After CAT generation, it turns left at the intersection.
Case 2: In the raw scene, the blue car drives inside the roundabout. After CAT generation, it runs out of the roundabout.
Case 3: In the raw scene, the blue car changes the lane gently. After CAT generation, it suddenly changes the lane.
Case 4: In the raw scene, the blue car drive normally on the highway. After CAT generation, it brakes suddenly due to a malfunction.
CAT Enhances AI Driving Safety
Case 1: A car makes an unprotected left turn at an intersection. The CAT agent learns to stay away from potentially dangerous vehicles.
Case 2: The leading car slows down. The CAT agent learns to change its lane and overtake that vehicle.
Case 3: The leading car cuts into the lane suddenly. The CAT agent learns to yield and change its lane ahead of time.
Case 4: Two vehicles traveling in opposite directions meet. The CAT agents learns to pass by.
Reference
@inproceedings{zhang2023cat,
title={CAT: Closed-loop Adversarial Training for Safe End-to-End Driving},
author={Zhang, Linrui and Peng, Zhenghao and Li, Quanyi and Zhou, Bolei},
booktitle={7th Annual Conference on Robot Learning},
year={2023}
}
Acknowledgement
This work was supported by the National Science Foundation under Grant No. 2235012 and the Cisco Faculty Award.