Reinforcement Learning in URBAN-SIM#
URBAN-SIM provides a modular and extensible framework for reinforcement learning (RL) in complex urban environments. It is built on top of Isaac Lab’s ManagerBasedRLEnv architecture and supports multi-environment parallel simulation, curriculum learning, and rich observations/actions.
This section introduces the major configurable components of the RL environment pipeline.
RL Environment Components
Component Overview#
Scene Binding RL environments are bound to a
SceneCfgthat defines the world layout, agent configuration, and asset loading. See: Scene ConfigurationActions URBAN-SIM supports multiple action interfaces, including velocity commands for wheeled and legged robots. See: Action Space
Observations Rich multimodal observations are available (e.g., RGB, depth, lidar, robot state). See: Observation Space
Rewards Task-specific rewards are defined via modular reward terms for navigation, collision avoidance, etc. See: Reward
Reset Conditions Environments reset based on terminal conditions like collisions, goal reached, or episode timeout. See: Termination Conditions
Curriculum Training difficulty can be gradually increased using a curriculum manager. See: Curriculum Learning
Events Optional simulation events (e.g., trigger zone entered, pedestrian spawn) that can influence rewards or resets. See: Events
Usage Tip#
Each component can be configured independently via the central EnvCfg class.
You can also subclass individual configs to customize robot interfaces, rewards, observations, or scene logic.
Example and Target Result#
We have provided several example environments that demonstrate the use of these components in practice. You can use the command:
python urbansim/learning/RL/train.py --env configs/env_configs/navigation/coco.yaml --enable_cameras --num_envs 256 --headless --video
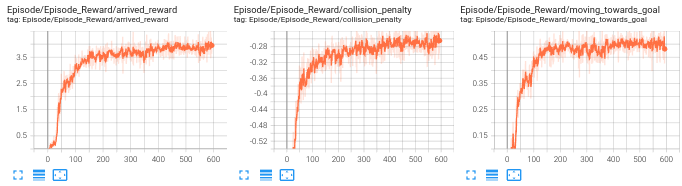
You will get the target training curves saved in TensorBoard-compatible format, like
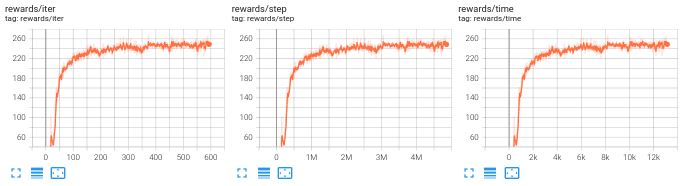
with additional details of each reward term, terminations, etc.
as well as videos during training saved in the logged_videos directory.